FA装置での原点復帰方法について
サーボモーター等の位置決め可能な制御で原点復帰とはなにか? PLCプログラム作成で原点復帰をどのようにするかを考察しました。
原点復帰とは
サーボモーターのようなパルス発信装置がついた機器の場合、モーターが動くと動いた分だけパルス信号を発信します。
例1000pls/mmであれば、1000回信号が来たら1mm動いたことになります。
※エンコーダ、位置決めについてはここでも説明してます。
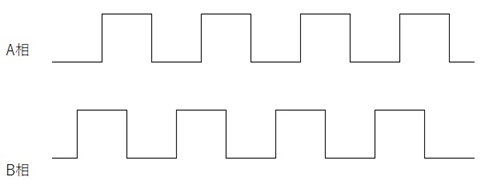
原点復帰とは、サーボモーターを原点方向に移動させて原点(HOME)信号が入った時を原点として設定することです。一般的にはAB相以外にZ相があって原点復帰信号がはいった最初のZ相のパルス信号で原点になった処理をします。
原点復帰の目的は
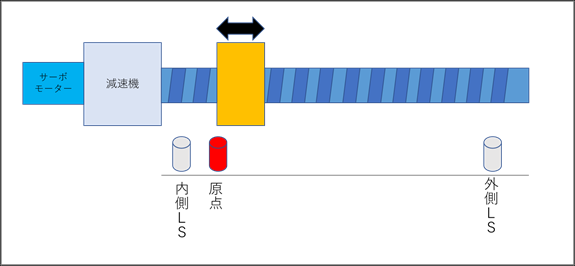
原点復帰は、サーボモーターやロボットが動作するのに、安全に(ゆっくりした速度で)初期設定の場所に(干渉しない方向で)移動して原点位置を設定します。設定された原点位置情報でハード的にリセットすることで、次動作位置の正確性を向上させます。
原点復帰は必要?
ロボットや位置決めでは、最初に原点設定を必ずします。これは、緊急停止等で装置を停止させた場合、安全カテゴリレベルによっては動力源を遮断するので現在値が消えてしまう可能性があり、そのため原点復帰が必要となります。
IAIのロボシリンダー等では、原点復帰指示しなくても原点消失した場合勝手に原点復帰をしてから動作を行うこともあります。
では原点復帰は必ず必要でしょうか?
最近の位置決めユニットでは原点復帰の要否も選択できるようになっています。
また、位置決めユニットでもパルス出力ユニットの場合はそもそもパルスエンコーダーの回帰入力がなければ、パルス出力するだけで位置の保証は一切ありません。
さらに、ユーザーからの要望からするとよっぽどでないと原点復帰するなんて面倒はしたくありません。
位置決め制御の継続運転について
通常の運転では、停止するたびに原点復帰をするプログラムの場合、原点復帰するためにほかの操作や動作をしないと物理的に干渉することもあるので非常に面倒になります。
このことから、現在の位置情報や動作状況をプログラムで管理して、復帰する場合継続運転することができるようにすることが望ましいでしょう。
原点復帰が必要な場合のプログラム作成
継続運転が難しい場合は、原点復帰が必要ですが、この場合原点復帰プログラムを再考する必要があります。
装置の状況に応じて、原点復帰用のプログラムを作成します。干渉状況に応じて、干渉するものを動かすとか、タッチパネルに「〇〇製品を取り出してください!」と表示したり、タッチパネルの音声合成を使って操作員になにをすべきか教示します。
こうすることで段階的に原点復帰できる環境を整えて、原点復帰をさせることができます。
まとめ
原点復帰の必要性とより運転しやすい継続運転方法を紹介しましたが、あくまで主観的意見ですので、装置や環境に応じて対応する必要があります。
安全回路で電源遮断するケースが必須のケースもあれば、人が干渉した場合でも安全に停止する、人とロボットが隣同士で作業できる技術も開発されてきています。
原点復帰が今後どのように必要とされるか、本当に必要なのかよく検討していくことが必要だと思います。